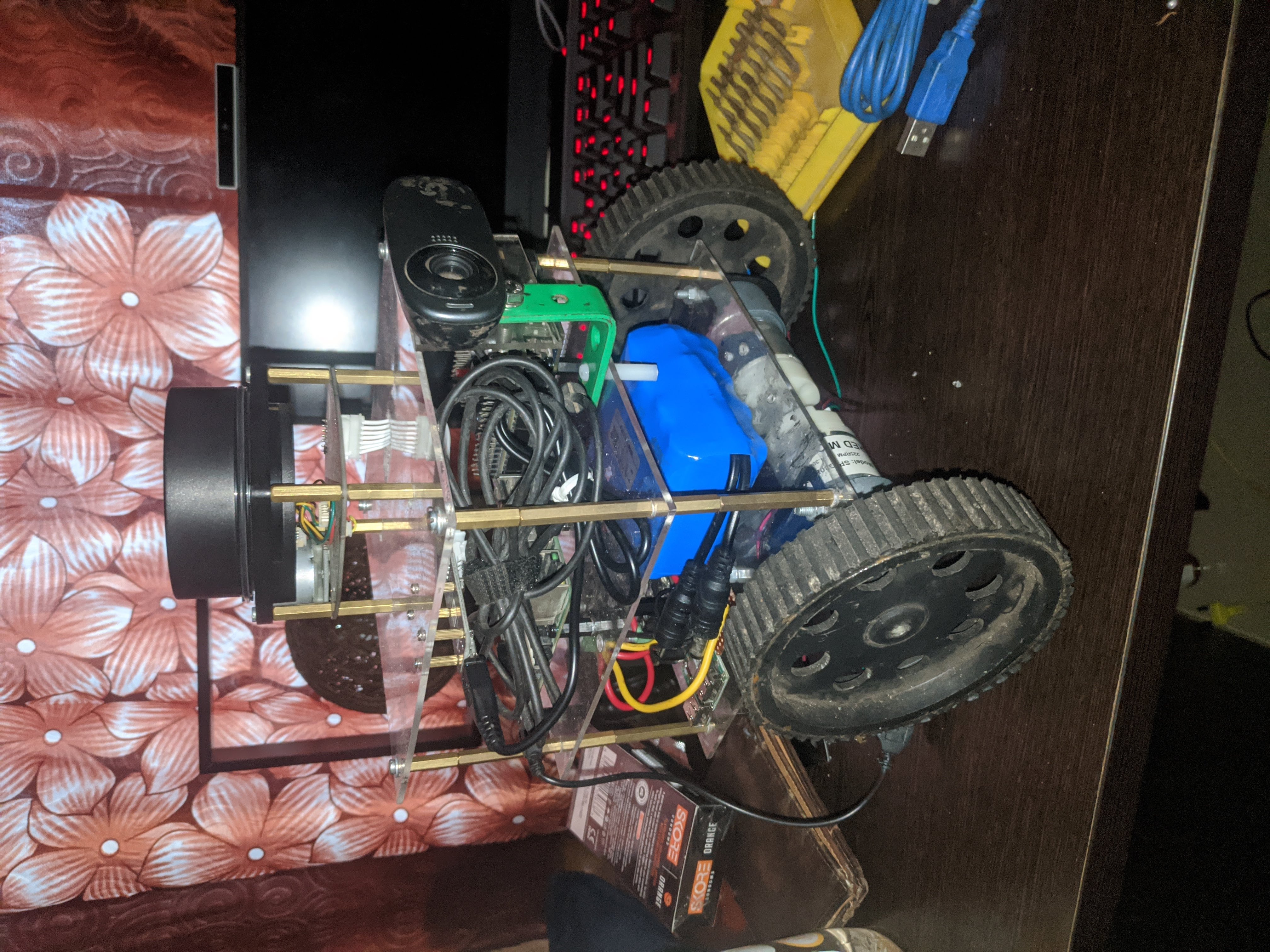
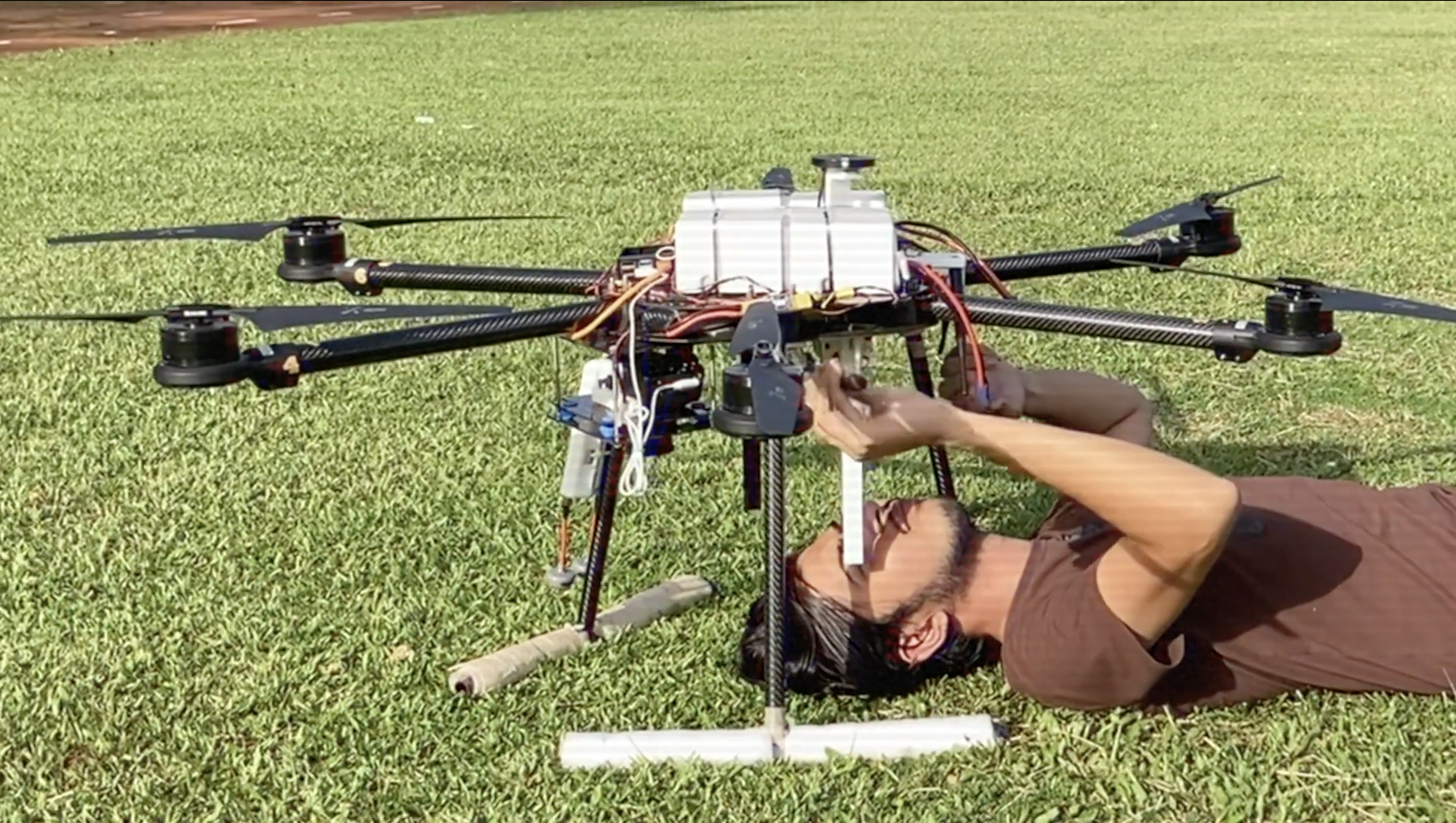
I modeled, simulated, built, and coded this Jetson Nano based UGV with SLAM, autonomous navigation, and ODCL using YOLOv3 for my Girlfriend's end-semester engineering project. She got an A!
Find out more north_eastHi.
I’m Arpit.
An Engineer.
Robots | Physical AI | Bangalore hustle.